Базовый робототехнический набор для изучения систем управления робототехническими комплексами и андроидными роботами “Сережа” на Arduino
Базовый робототехнический набор “Сережа” на Arduino – это образовательный комплект, предназначенный для изучения систем управления робототехническими комплексами и андроидными роботами. Он состоит из комплекта серво модулей, что позволяет изучить сложносоставные кинематические схемы.
Использование данного набора также способствует развитию инженерных навыков в области управления робототехническими системами, робототехническими комплексами и контроллерами для управления роботов. Это помогает учащимся получить необходимые знания и умения для успешной работы в данной области.
В целом, базовый робототехнический набор “Сережа” на Arduino является отличным инструментом для обучения и развития навыков в области робототехники и управления роботами.
Возможности набора:
- Программирование через непосредственное управление моторами
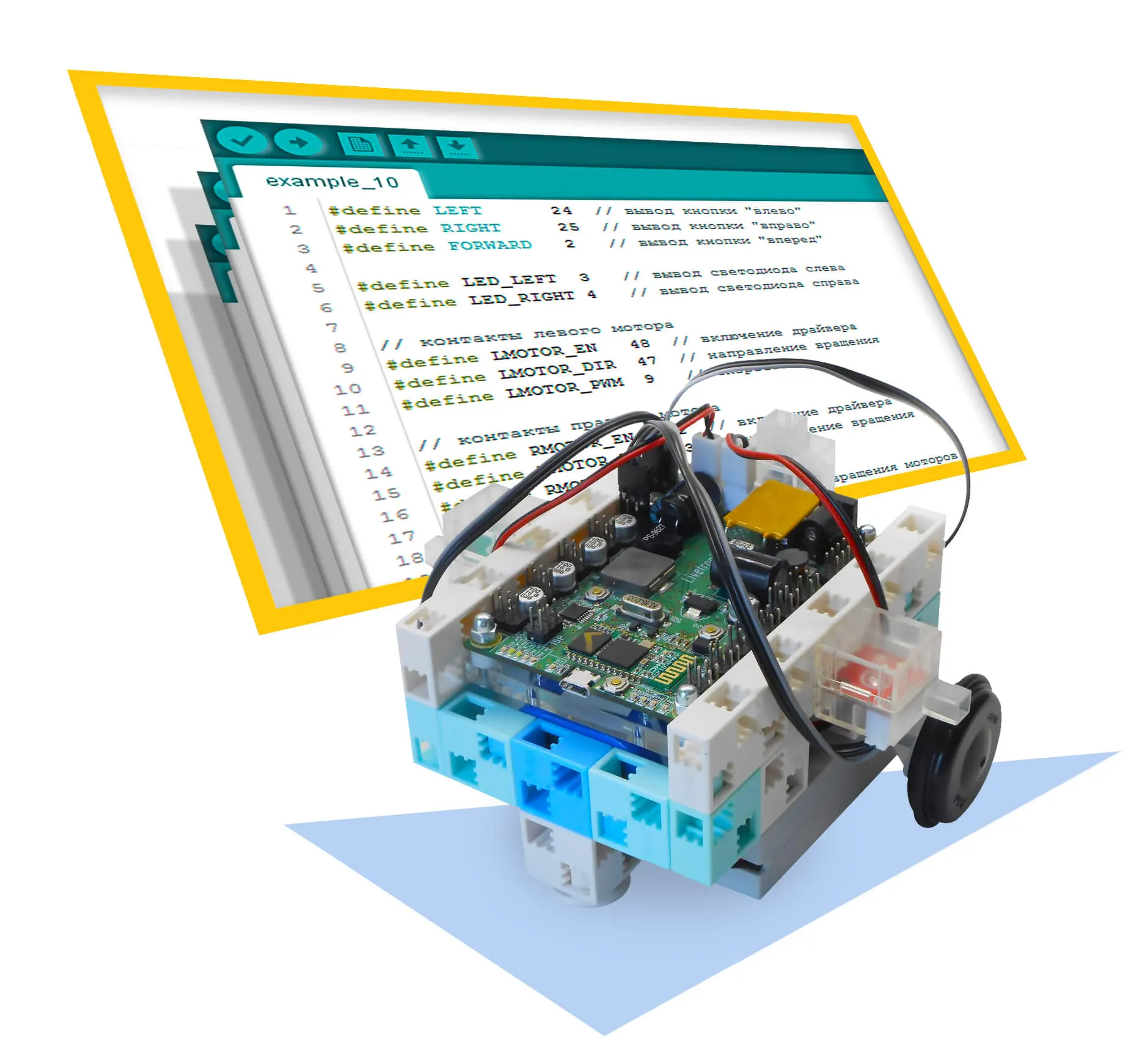
- программирование в среде Arduino
- Распознавание цветов
- Мощные сервоприводы
- Возможность изучить 14 различных команд с открытым исходным годом
- Алгоритм восстанавливающий исходное положение при падении робота
- Объектно-ориентированный подход в программировании;
- Качественное исполнение деталей для сборки;
- Возможность программировать с компьютера, ноутбука, или управлять при помощи пульта дистанционного управления
- Возможность подключать более 5 дополнительных модулей и датчиков
- Возможно совмещать с другими наборами, создавая автоматические производственные линии
- Подача сигнала при низком напряжении
- 2 степени свободы на каждую руку
- 4 степени свободы на каждую ногу
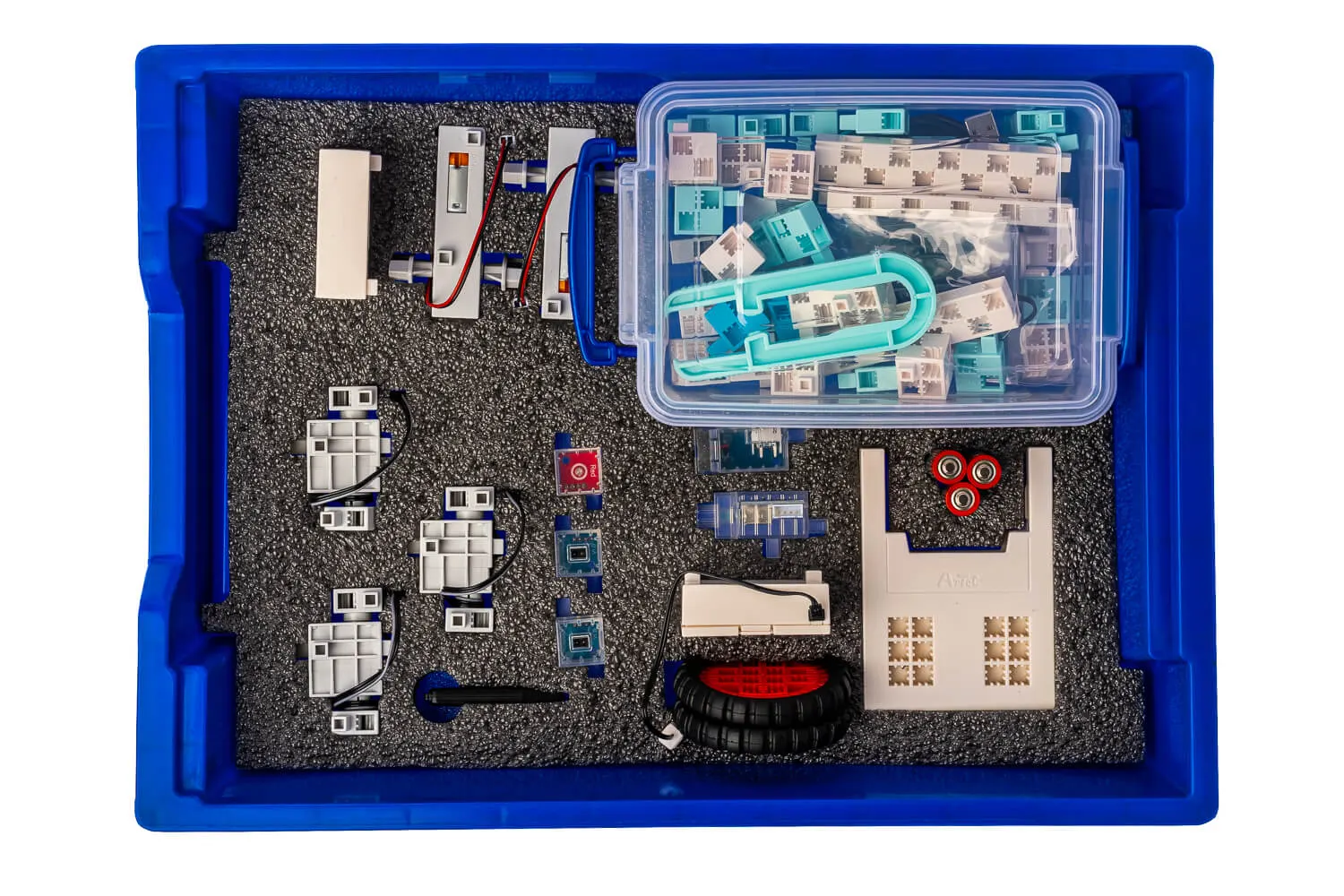
Комплектация
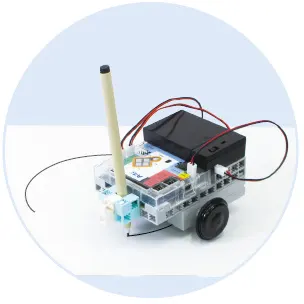
Робот находится уже в собранном состоянии и включает в себя:
- Arduino подобный контроллер STM32F103RBT6, с частотой процессора 72 МГц, 7 DMA каналов, 9 портов подключения, CRC проверка. Контроллер программируется через Arduino IDE, использующую современный C подобный язык.
- LX-824HV сервоприводы, современный распространенный сервопривод. Вес 57 грамм, использует питание 9 – 12.6 Вольт. И имеет угол поворота 0 – 240 градусов. Используется в конечностях робота, для надежного и быстрого перемещения.
- LFD-01M сервопривод, современный распространенный сервопривод. Вес 14 грамм, использует питание 4.8-6 Вольт. Имеет угол поворота 0 – 180 градусов. Используется для вращения головы робота.
Ультразвуковой датчик расстояния с RGB подсветкой, использует питание в 5 Вольт. Измеряет расстояние от 2 до 400 см. Помогает андроиду распознавать препятствия и избегать их. Так же позволяет распознавать объекты, с которыми можно будет взаимодействовать. - Акселерометр – гироскоп MPU6050 используется для распознавания угла наклона робота по трем осям координат. Для расчета используются кватернионы.
- ИК ресивер – позволять принимать сигнал инфракрасного спектра электромагнитного излучения на расстоянии 15-18 метров.
- ИК передатчик – позволяет посылать сигнал инфракрасного спектра электромагнитного излучения на расстоянии 8 метров.
- Модуль отображения напряжения – 8 сегментный светодиод, который контролирует остаточное напряжение питательного элемента андроида, для контроля его заряда.
Так же дополнительно входят в комплект:
- Зарядное устройство – для литиевых аккумуляторов напряжением в 11.1 Вольт.
- Кабель USB – USB mini – для подключения к контроллеру и загрузки программ.
- Пульт дистанционного управления роботом – пульт с ИК ресивером и приемником для дистанционного управления роботом.
- Кабель USB – USB micro – для подключения к контроллеру и загрузки программ.
- Набор запасных частей – набор запасных частей для замены утерянного/изношенного оборудования.
- Отвертка – для съема не требуемых модулей, либо для замены или дополнения робота дополнительными модулями.
Уровни обучения:
- Исследовательский уровень – знакомство с управлением многокомпонентными системами в текстовых языках программирования, изучение работы моторов и сервоприводов, ориентирование в пространстве, перемещаться в автоматическом режиме. Видоизменять программы для корректировки использования под свои конкретные кейсы.
- Продвинутый уровень – знакомство с кинематикой, основы тригонометрии, углубленное изучение текстовых языков программирования, изучение физических основ работы датчиков. Создание сложносоставные программы, для решения поставленных задач.